自動車メーカーは、電子部品の不足という危機に瀕していますが、インテリジェントカーのトレンドには抗しがたいものがあります。 PEPS (Passive Entry and Passive Start) システムは、ユーザーにとってスマートであることの最も印象的な証拠であり、もはや高級車だけの注目を集める機能ではありません。多くの自動車メーカー、特に新興ブランドによって、中間層または経済的なモデルにさえ導入されています。EV販売が2022年上半期に100%以上の成長を遂げる中国市場では、BYD、GAC Aion、Geely、Nio、Xpeng、Li Autoなどの主要な電気自動車メーカーが、基本的にすべてのモデルに PEPS を装備しています。

その ECU は静かに私たちドライバーを驚かせますが、その製造の軌跡とその将来の見通しを調査することを考えたことはありますか? 道に出ましょう。
PEPS は、ドライバーが手動でロックを解除することなく、安全に車に乗り込む経験をドライバーに提供します。車のエンジンと HVAC システムは、運転手または同乗者が車に乗り込む前にリモートで始動できます。すべての乗客が車を離れる間、PEPS が自動的に車をロックします。このように、車のユーザーは、セキュリティが確保されたパッシブ エントリーの利便性を享受できます。それが「パッシブ」という言葉で名付けられた理由でしょう。
昨日: RKE と PKE
現在主流の PEPS ソリューションは、Bluetooth Low Energy (BLE)、NFC、RFID (高周波および低周波) などのワイヤレス技術を統合しています。今日の時点で話をすると、消化するのが難しいでしょう。さぁ、昨日をフラッシュバックしませんか?
1990 年代の終わりに、一部の高級車モデルは、低周波 RFID (125KHz) に基づく初期の IMMO (イモビライザー) ソリューションを進化させたリモート キーレス エントリー (RKE) システムを段階的に導入しました。PEPS の前身である RKE には、UHF(超高周波)信号を車の BCM(ボディ コントロール モジュール)に接続された RF 受信機に送信して、ユーザーの身元を確認するキー フォブがあります。ID が確認されると、システムは BCM によって駆動されるドアの開閉アクションを実行します。図 1 に示すような一方向の検証メカニズムは、スパイ映画の事前に設定された暗号として解釈できます。訪問秘密エージェントが会議場に来るとき、彼または彼女はそのような暗号を話すか見せなければなりません。この仕組みの欠点は、敵が侵入して暗号を取得すると、
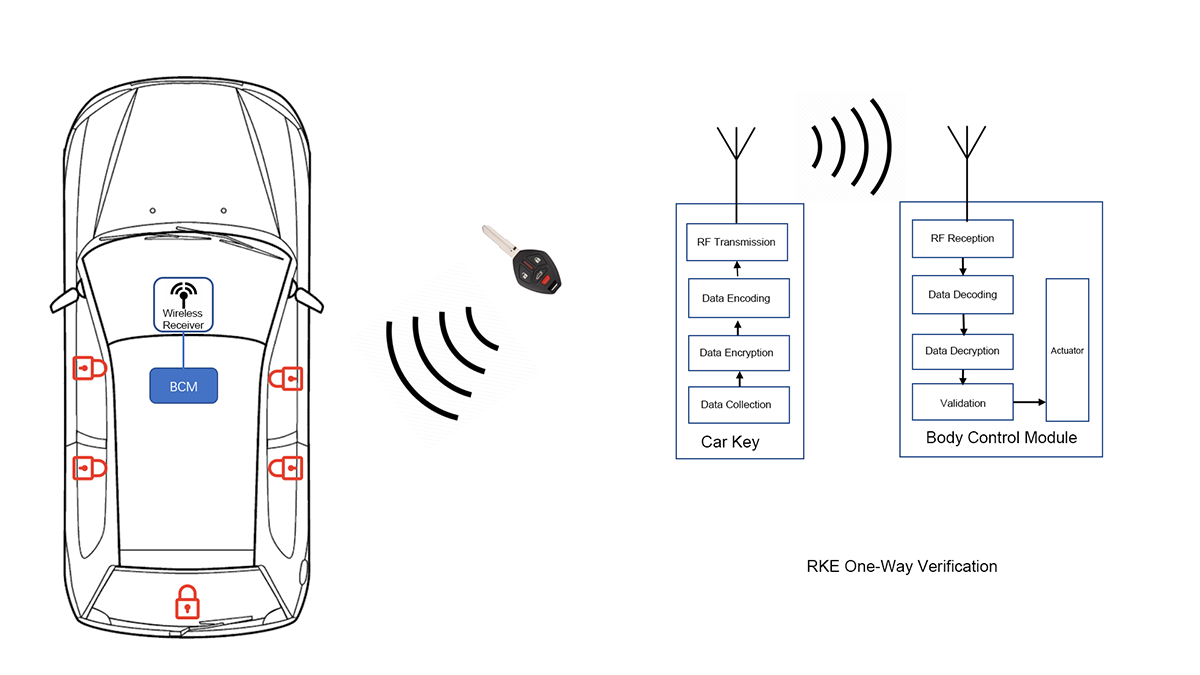
図 1. RKE の動作メカニズム
RKE ソリューションは、315 MHz (米国、中国、日本など)、433.92 MHz (欧州、中国)、868 MHz (欧州)の周波数帯域を採用しています。信号変調に関しては、ほとんどの国が ASK (振幅シフト キーイング) を採用しています。 ) モード、日本は FSK (周波数シフト キーイング) モードを採用しています。シリコン ラボ、マキシム、マイクロチップ、NXP などの IC ベンダーは、この分野で製品を提供しています。
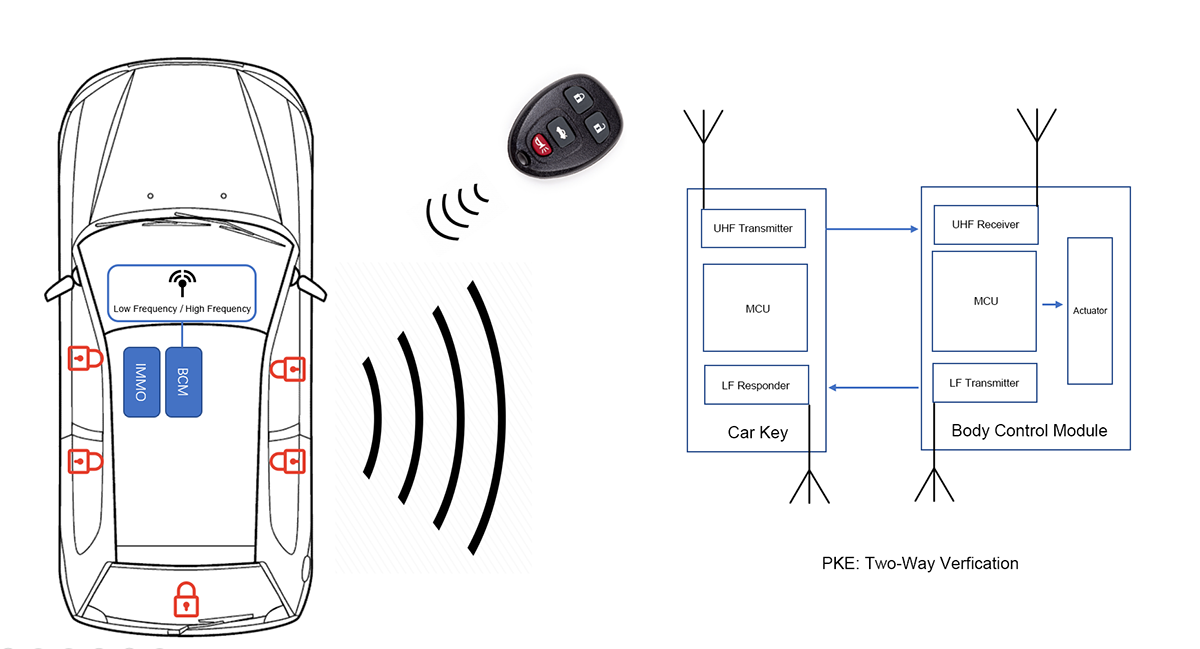
図 2. PKE の動作メカニズム
今日: Bluetooth PEPS が主流
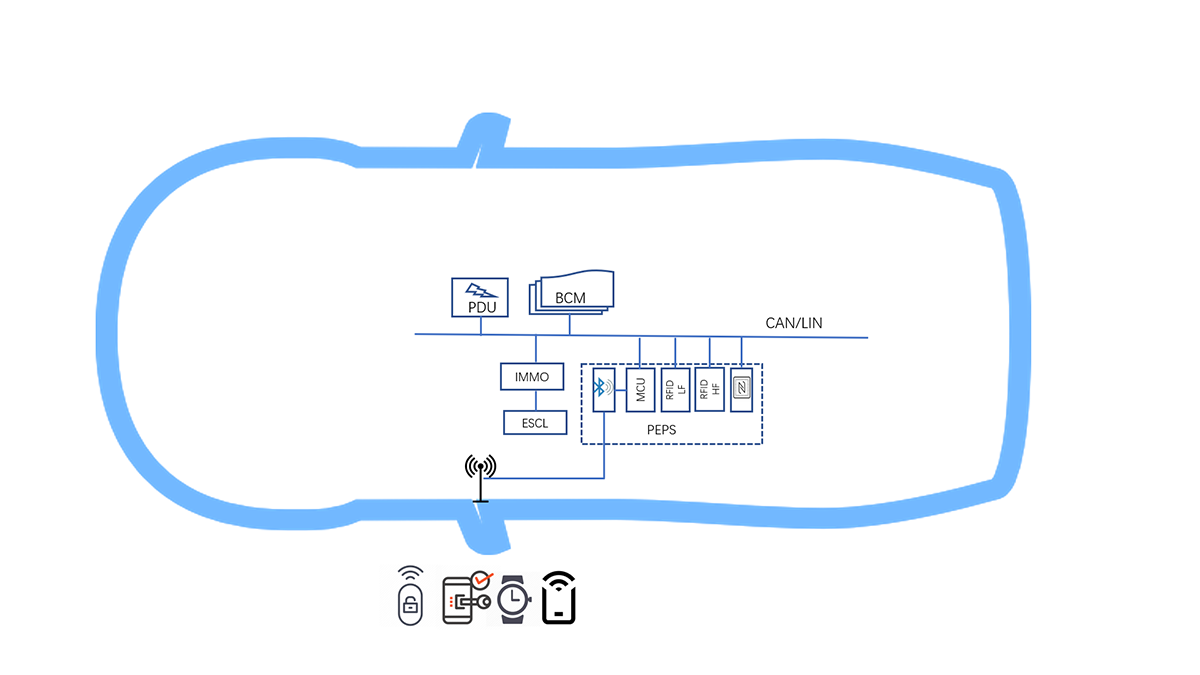
図 3. エントリー レベルの Bluetooth PEPS スキーム (RSSI シングル ステーション)
主流の PEPS を実現する AOA 技術
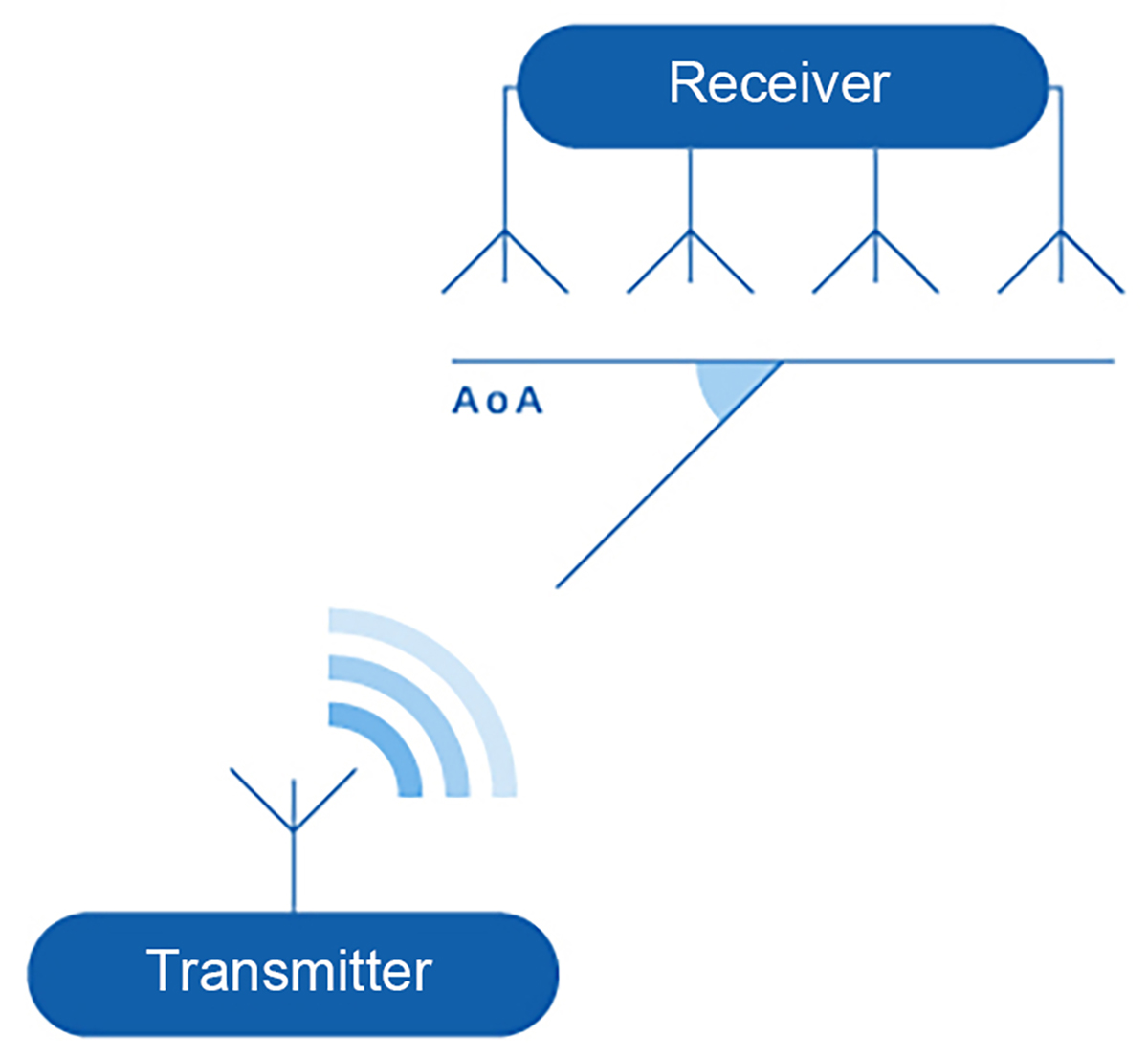
図 4. Bluetooth AOA ポジショニング
明らかに、測位の精度レベルを向上させるには、AoA アルゴリズムを備えた複数の Bluetooth ベース ステーションのサポートが必要です。したがって、中間層モデルでは、自動車メーカーは、図 5 に示すように、マルチポイント Bluetooth PEPS の展開を選択します。ただし、基地局の正確な数とレイアウト パターンは、車種によってある程度異なります。
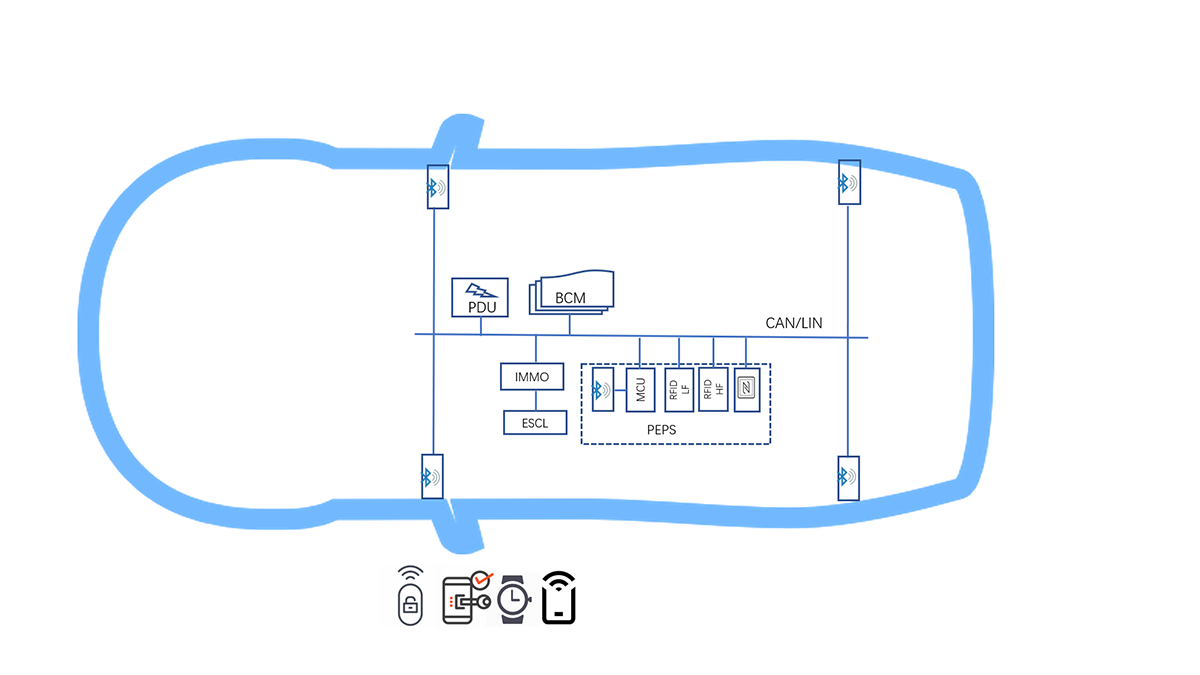
図5.主流の Bluetooth PEPS ソリューション (AoA ポジショニング)
Bluetooth PEPS 分野で最も採用されている SoC には、TI CC2640、Silicon Labs EFR32BG22、NXP KW36 などがあります。
明日: UWB は有望
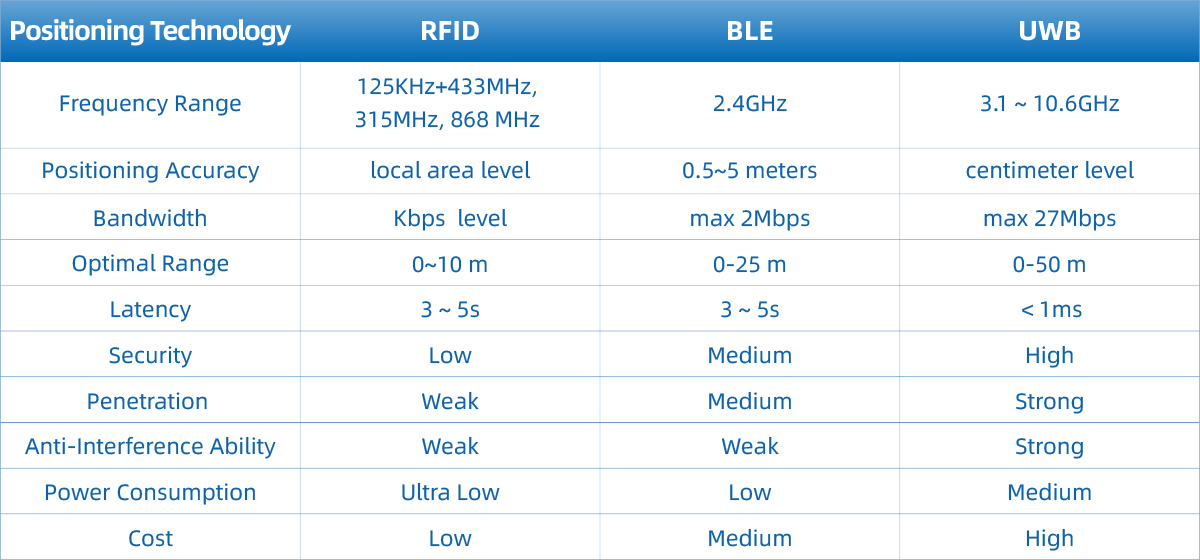
表 1. PEPS 測位技術の比較
UWB のポジショニング アルゴリズム
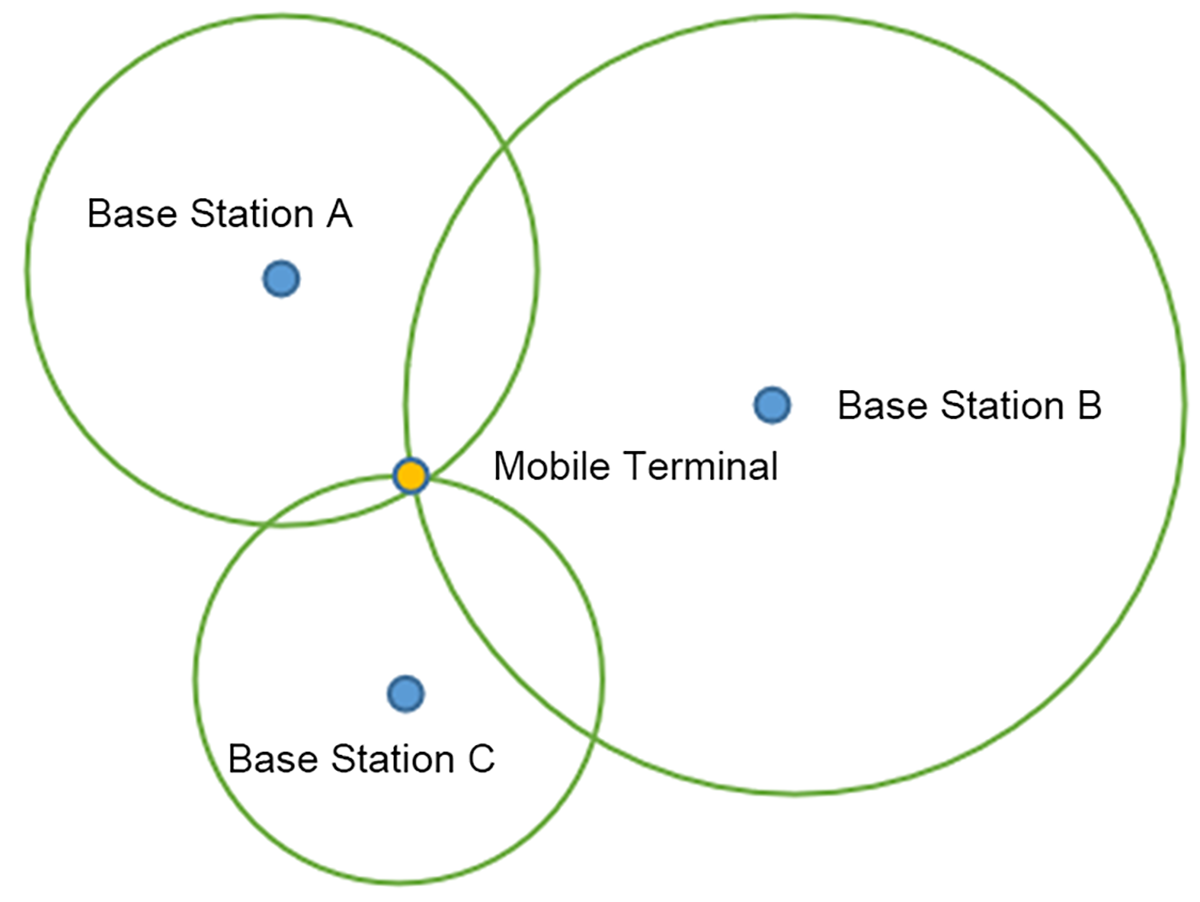
図 6. TOA 測位アルゴリズム (円形測位法)
TDOA は、TOA を改良したもので、基地局間の正確な同期を実現しやすくなっています。図 7 に示すように、移動端末と基地局間の時間同期は関係ありません。まず、移動端末と基地局 A の間の距離差と、移動端末と基地局 B の間の距離差を計算します。移動端末は双曲線上にある必要があります。基地局Aと基地局Bを焦点とする。双曲線の別のセットは、移動端末と基地局 A および基地局 C との間の距離差によって取得でき、双曲線の交点が移動端末の位置です。車両空間の範囲では、距離差によりマルチパスやノイズなどの影響も低減できます。
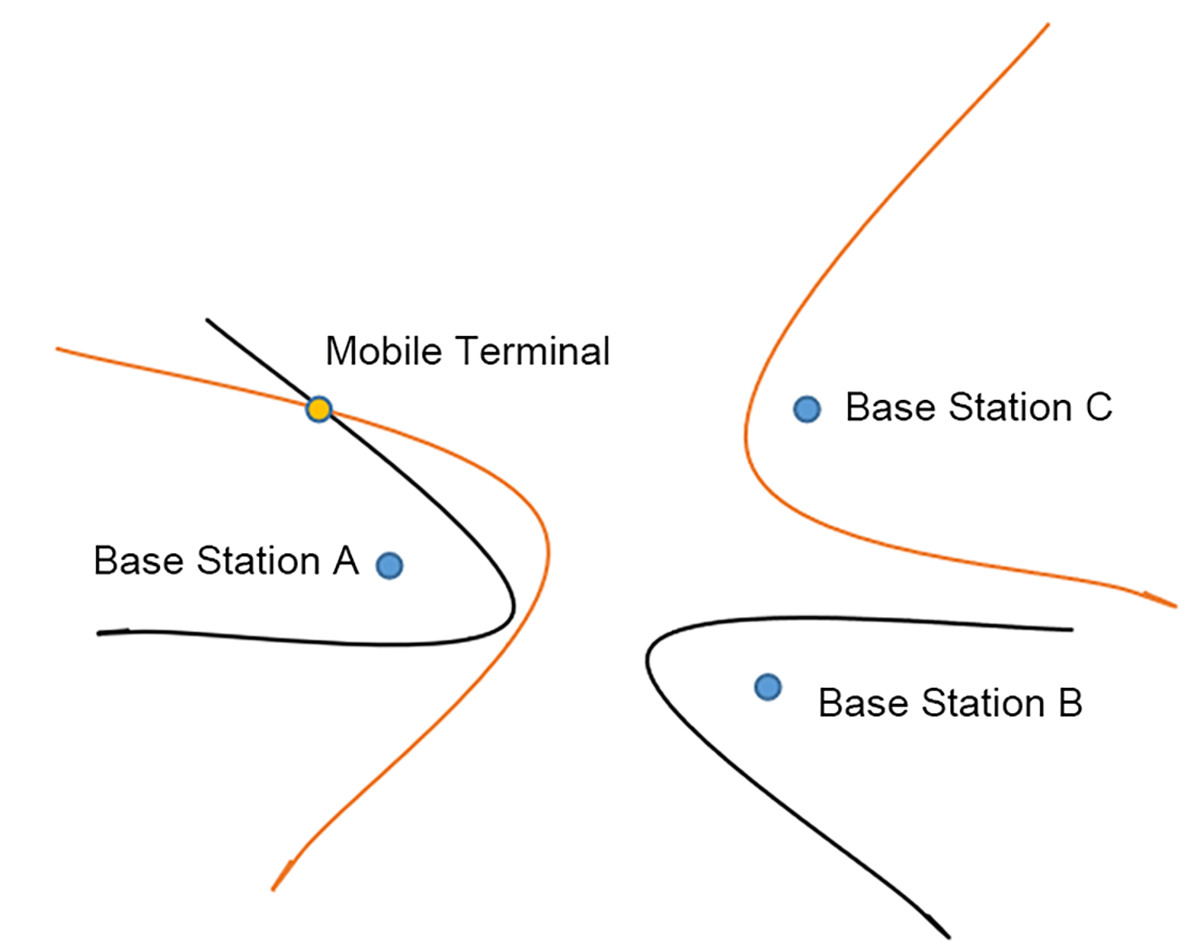
図 7 TDOA ポジショニング アルゴリズム
AOA測位は、位相差の原理に基づいて到来角を計算し、測位を達成するために2つの基地局のみを必要とします。角度分解能の問題から、基地局からの距離が遠くなるほど測位精度が低下するため、主に近距離および中距離での測位に使用されます。
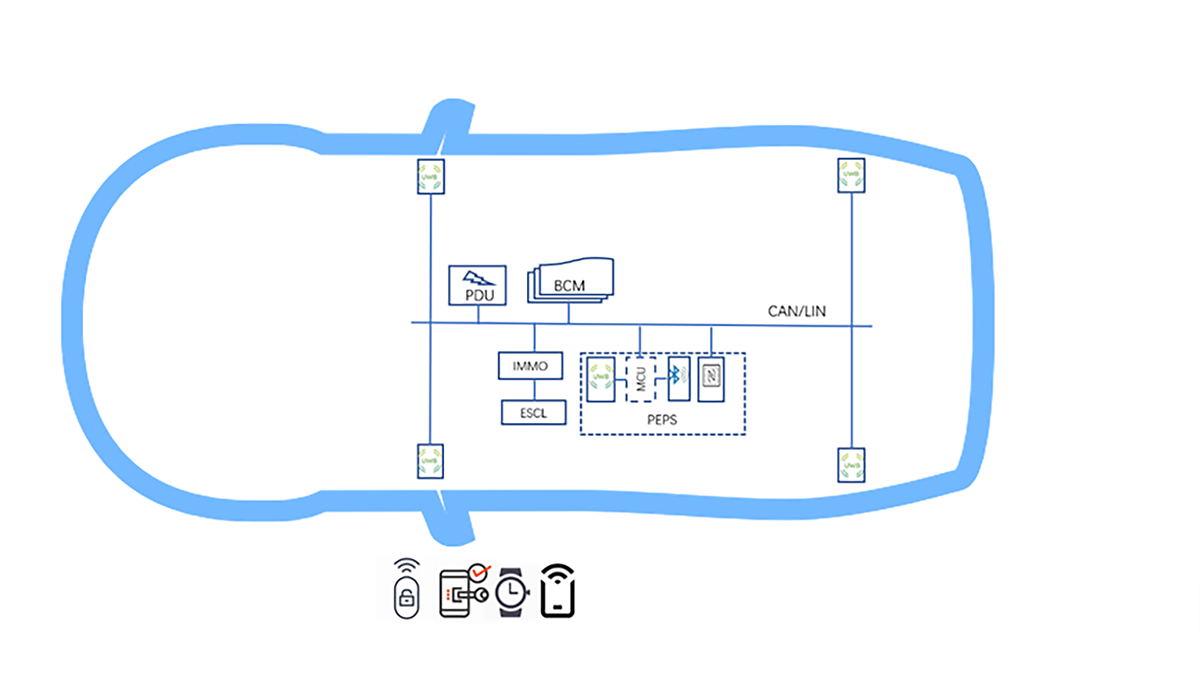
図 8. CCC 3.0 で規定された UWB PEPS の実装アーキテクチャ
UWB チップの分野で現在認識されている成熟したメーカーは、Apple、NXP Trimension、QORVO Decawave です。同社がリリースしたICの中で、NXP Trimension NCJ29D5のみが車両規制の要件を満たしています。
拡張機能: バイオレーダー
ドライバー向けの UWB PEPS のエクスペリエンスは、親密で安全です。しかし、車の乗客は同じように感じますか? 通常はありますが、特殊なケースではありません。時にはそれは彼らにとって厳しいものです。たとえば、ドライバーが車から降りると、ドアが自動的にロックされます。赤ちゃんやかわいいペットが誤って車内に置き忘れられました。車はドライバーにアラームを送信する必要がありますか? 絶対に必要な!幸いなことに、UWB によって適切に対処できます。
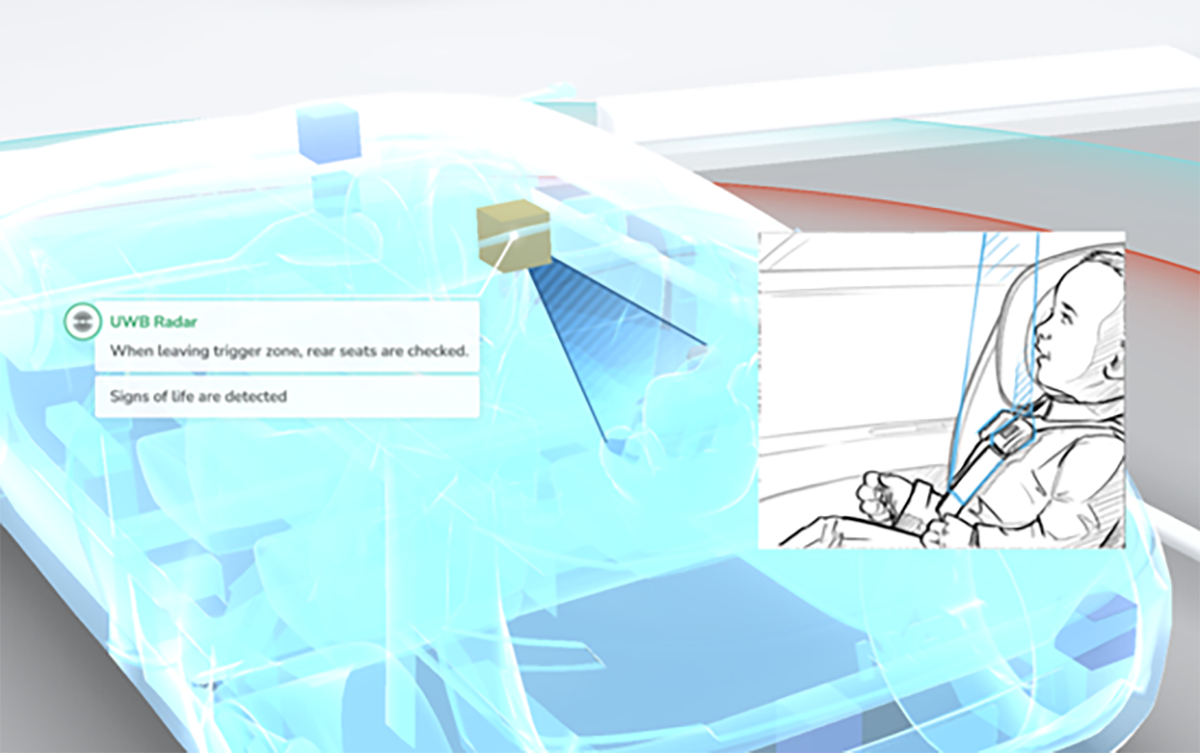
図 9. UWB バイオレーダーによる生命検出
トランク: キック トゥ オープン
UWB レーダーの動作認識機能に基づいた車内の人命検出に加えて、UWB には、踏み鳴らしてトランクを開けるという巧妙なアプリケーションもあります。ドライバーの身元が車両の後部に到達すると、UWB レーダーが踏みつけ動作を正確に検出できるため、車両のトランクが自動的に開きます。
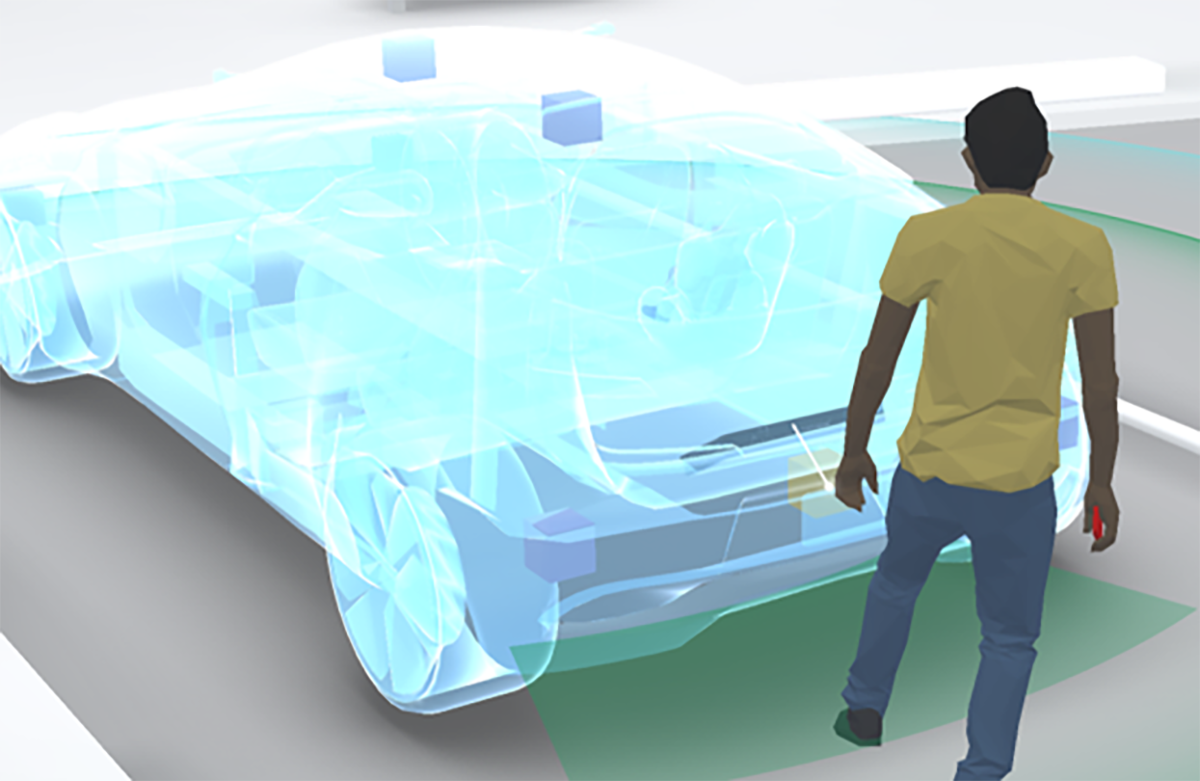
図 10. UWB が可能にする Kick-to-Open ソリューション
UWBバイオレーダーとUWBキッキングレーダーを含む上記の2つのUWBレーダー機能は、追加のハードウェアを必要とせず、追加のハードウェアコストを追加せずに車両側のUWBハードウェアを再利用することによってのみ実装されます. また、将来の UWB PEPS 機能の一部と見なすこともできます。
UWB対応の自動バレーパーキング
AVP (Automated Valet Parking) は、自動バレーパーキング機能です。ユーザーに「ラストワンマイルの自由」を提供するL4レベルの自動運転技術として知られています。図 11 に示すように、これは現在、商用化のための最も有望な自動運転アプリケーション シナリオです。UWB で PEPS エクスペリエンスを実装することのもう 1 つの大きな利点は、車の側面に AVP を実装するために必要かつ十分な条件が提供されることです。
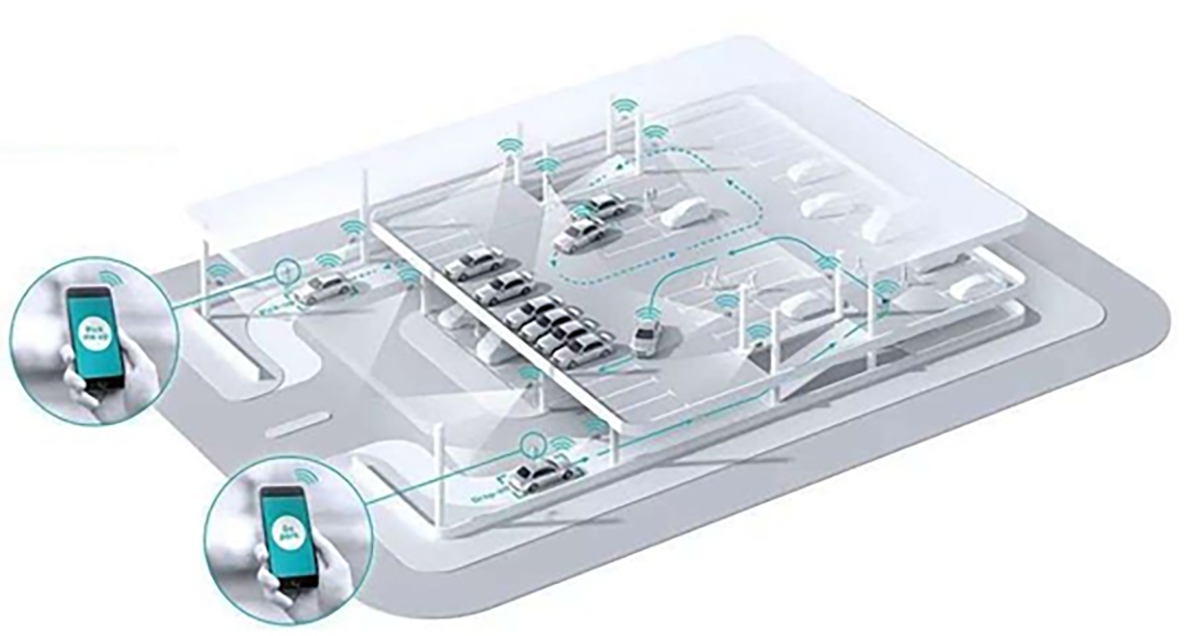
図 11 自動バレーパーキングシステム
図 12 は、実現可能な車両側 UWB ノード レイアウト スキームを示しています。ヘッドライトとテールライトに合計 4 つの UWB PEPS ノードが配置され、ルーフに 5 つ目の UWB PEPS+AVP ノードが配置されます。5番目のノードは、車内のUWB信号と車外のUWB信号の両方を受信でき、AVP機能を実現するためのキーノードでもあります。
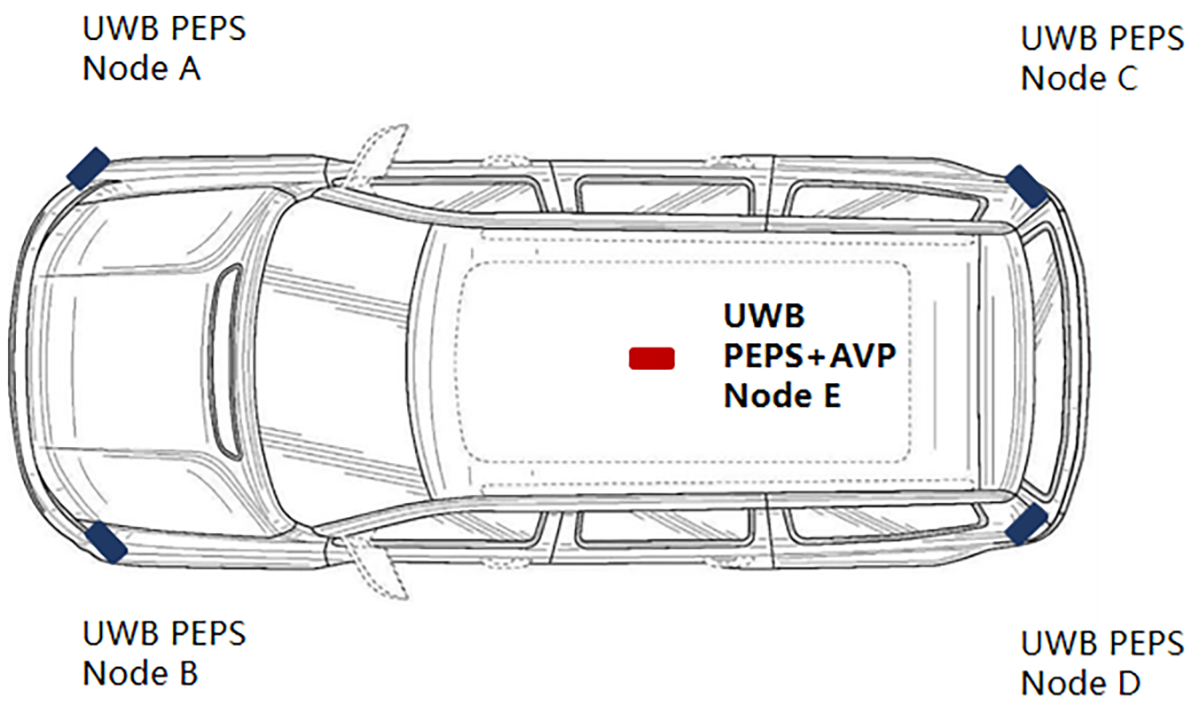
図 12 PEPS + AVP のアーキテクチャ
PEPS モードでは、5 番目の UWB ノードが他の 4 つの UWB ノードと協力してスマート キーの位置の測定を完了し、測距情報をボディ ドメイン コントローラー (BCM) に送信してスマート キーの位置の計算を完了します。キーを押して、次のロック解除を決定し、操作を開始します。
結論
Shenzhen HQ: Room 503, Podium Building No. A-12, Shenzhen Bay Science and Technology Ecological Park, Nanshan District, Shenzhen, Guangdong, China, 518063
Chengdu Branch: N2-1604, Global Center, North No. 1700, Tianfu Avenue, Hi-Tech District, Chengdu, Sichuan, China
電話 : +86 (0)28-86925399
Eメール : info@szrfstar.com
Teams : Sunny Li
Whatsapp : +8618190842785




















